Der Oszillator besitzt eine Ruhe-/Gleichgewichtslage.
Lenkt man den Oszillator aus der Ruhelage aus, so wirkt eine rücktreibende Kraft/Rückstellkraft.
Aufgrund der Trägheit bewegt sich der Oszillator nach dem Loslassen unter Einfluss der Rückstellkraft durch die Ruhelage hindurch. Auslenkung, Elongation
s
(
t
)
{\displaystyle s(t)}
Amplitude (maximale Auslenkung)
s
^
{\displaystyle {\hat {s}}}
Geschwindigkeit
v
=
Δ
s
Δ
t
⇒
v
(
t
)
=
s
˙
(
t
)
{\displaystyle v={\frac {\Delta s}{\Delta t}}\quad \Rightarrow \quad v(t)={\dot {s}}(t)}
Beschleunigung
a
=
Δ
v
Δ
t
⇒
a
(
t
)
=
v
˙
(
t
)
=
s
¨
(
t
)
{\displaystyle a={\frac {\Delta v}{\Delta t}}\quad \Rightarrow \quad a(t)={\dot {v}}(t)={\ddot {s}}(t)}
Periodendauer
T
{\displaystyle T}
s
{\displaystyle s}
Frequenz
f
=
1
T
,
[
f
]
=
1
s
=
H
z
{\displaystyle f={\frac {1}{T}},\quad [f]={\frac {1}{\rm {s}}}={\rm {Hz}}}
Kreisfrequenz
ω
=
2
π
f
,
[
ω
]
=
1
s
=
H
z
{\displaystyle \omega =2\pi f,\quad [\omega ]={\frac {1}{\rm {s}}}={\rm {Hz}}}
Ein Federpendel in Ruhelage und ausgelenkt. → Animation Wir wollen die Rückstellkraft abhängig von der Auslenkung
s
{\displaystyle s}
s
0
{\displaystyle s_{0}}
F
F
=
D
⋅
s
0
{\displaystyle F_{F}=D\cdot s_{0}}
G
=
m
g
{\displaystyle G=mg}
F
F
=
D
⋅
s
0
=
G
=
m
g
⇒
D
⋅
s
0
=
m
g
.
(
1
)
{\displaystyle F_{F}=D\cdot s_{0}=G=mg\quad \Rightarrow D\cdot s_{0}=mg\,.\quad (1)}
Für die Rückstellkraft
F
R
{\displaystyle F_{R}}
F
R
=
F
F
−
G
=
D
⋅
(
s
0
−
s
)
−
m
g
{\displaystyle F_{R}=F_{F}-G=D\cdot (s_{0}-s)-mg}
und mit (1) folgt:
F
R
=
−
D
⋅
s
{\displaystyle F_{R}=-D\cdot s}
s
(
t
)
{\displaystyle s(t)}
[ Bearbeiten ] Die Rückstellkraft
F
R
{\displaystyle F_{R}}
m
{\displaystyle m}
s
{\displaystyle s}
F
=
m
⋅
a
{\displaystyle F=m\cdot a}
ergibt sich:
F
R
=
−
D
⋅
s
(
t
)
=
m
⋅
a
(
t
)
{\displaystyle F_{R}=-D\cdot s(t)=m\cdot a(t)}
Setzen wir für die Beschleunigung
a
(
t
)
{\displaystyle a(t)}
a
(
t
)
=
s
¨
(
t
)
{\displaystyle a(t)={\ddot {s}}(t)}
−
D
⋅
s
(
t
)
=
m
⋅
s
¨
(
t
)
{\displaystyle -D\cdot s(t)=m\cdot {\ddot {s}}(t)}
Umgestellt ergibt sich die
Differentialgleichung (DGL) des harmonischen Oszillators:
s
¨
(
t
)
+
D
m
⋅
s
(
t
)
=
0
{\displaystyle {\ddot {s}}(t)+{\frac {D}{m}}\cdot s(t)=0}
Gesucht ist eine Funktion
s
(
t
)
{\displaystyle s(t)}
−
D
m
{\displaystyle -{\frac {D}{m}}}
s
(
t
)
=
s
^
⋅
sin
(
ω
t
−
φ
)
{\displaystyle s(t)={\hat {s}}\cdot \sin(\omega t-\varphi )}
⇒
s
˙
(
t
)
=
s
^
ω
⋅
cos
(
ω
t
−
φ
)
{\displaystyle \Rightarrow \,{\dot {s}}(t)={\hat {s}}\omega \cdot \cos(\omega t-\varphi )}
⇒
s
¨
(
t
)
=
−
s
^
ω
2
⋅
sin
(
ω
t
−
φ
)
{\displaystyle \Rightarrow \,{\ddot {s}}(t)=-{\hat {s}}\omega ^{2}\cdot \sin(\omega t-\varphi )}
Eingesetzt in Die DGL ergibt sich:
−
s
^
ω
2
⋅
sin
(
ω
t
−
φ
)
+
D
m
⋅
s
^
⋅
sin
(
ω
t
−
φ
)
=
(
−
ω
2
+
D
m
)
⋅
s
^
⋅
sin
(
ω
t
−
φ
)
=
0
{\displaystyle -{\hat {s}}\omega ^{2}\cdot \sin(\omega t-\varphi )+{\frac {D}{m}}\cdot {\hat {s}}\cdot \sin(\omega t-\varphi )=\left(-\omega ^{2}+{\frac {D}{m}}\right)\cdot {\hat {s}}\cdot \sin(\omega t-\varphi )=0}
Diese Gleichung ist für alle Zeiten
t
{\displaystyle t}
(
−
ω
2
+
D
m
)
=
0
⇒
ω
2
=
D
m
{\displaystyle \left(-\omega ^{2}+{\frac {D}{m}}\right)=0\quad \Rightarrow \quad \omega ^{2}={\frac {D}{m}}}
Schwingendes Federpendel. Damit ist die allgemeine Lösung der Differentialgleichung des harmonischen Oszillators:
s
(
t
)
=
s
^
⋅
sin
(
D
m
⋅
t
−
φ
)
{\displaystyle s(t)={\hat {s}}\cdot \sin \left({\sqrt {\frac {D}{m}}}\cdot t-\varphi \right)}
Die Amplitude
s
^
{\displaystyle {\hat {s}}}
φ
{\displaystyle \varphi }
Für die Schwingungsdauer
T
{\displaystyle T}
T
=
2
π
m
D
{\displaystyle T=2\pi {\sqrt {\frac {m}{D}}}}
Merke:
Um Oszillatoren beschreiben zu können, benötigen wir immer die Rückstellkraft in Abhängigkeit der Auslenkung.
Rückstellkraft am Fadenpendel:
F
→
R
=
F
→
t
a
n
{\displaystyle {\vec {F}}_{\mathrm {R} }={\vec {F}}_{\mathrm {tan} }}
Fadenpendel und Rückstellkraft. Für das Fadenpendel können wir die Rückstellkraf durch Kräftezerlegung herleiten. Aus der Zerlegung (siehe Bild) findet man:
F
R
=
−
|
F
→
t
a
n
|
=
−
F
g
⋅
sin
(
α
)
{\displaystyle F_{\mathrm {R} }=-|{\vec {F}}_{\mathrm {tan} }|=-F_{g}\cdot \sin(\alpha )}
Wenn wir den Winkel
α
{\displaystyle \alpha }
α
=
x
l
{\displaystyle \alpha ={\frac {x}{l}}}
x
{\displaystyle x}
F
g
=
m
g
{\displaystyle F_{g}=mg}
F
R
(
x
)
=
−
m
g
⋅
sin
(
x
l
)
{\displaystyle F_{\mathrm {R} }(x)=-mg\cdot \sin \left({\frac {x}{l}}\right)}
Offensichtlich ist die Rückstellkraft
F
R
{\displaystyle F_{\mathrm {R} }}
α
=
x
l
{\displaystyle \alpha ={\frac {x}{l}}}
[ Bearbeiten ] Für hinreichend kleine Auslenkungen gilt:
sin
(
x
)
≈
x
,
tan
(
x
)
≈
x
{\displaystyle \sin(x)\approx x,\quad \tan(x)\approx x}
Trigonometrie an einem sehr spitzen, rechtwinkligen Dreieck:
sin
(
Θ
)
=
O
H
≈
s
A
=
Θ
{\displaystyle \sin(\Theta )={\frac {O}{H}}\approx {\frac {s}{A}}=\Theta }
Für kleine Winkel
α
{\displaystyle \alpha }
gilt im Bogenmaß :
sin
(
α
)
≈
α
⇒
sin
(
x
l
)
≈
x
l
{\displaystyle \sin(\alpha )\approx \alpha \quad \Rightarrow \quad \sin \left({\frac {x}{l}}\right)\approx {\frac {x}{l}}}
Eingesetzt in die Formel für die Rückstellkraft ergibt sich:
F
R
(
x
)
=
−
m
g
⋅
sin
(
x
l
)
≈
−
m
g
⋅
x
l
=
−
m
g
l
⋅
x
{\displaystyle F_{\mathrm {R} }(x)=-mg\cdot \sin \left({\frac {x}{l}}\right)\approx -mg\cdot {\frac {x}{l}}=-{\frac {mg}{l}}\cdot x}
Für hinreichend kleine Auslenkungen ist
F
R
{\displaystyle F_{\mathrm {R} }}
[ Bearbeiten ] Als Bewegungsgleichung erhält man:
F
=
m
⋅
a
=
F
R
=
−
m
g
l
⋅
x
{\displaystyle F=m\cdot a=F_{\mathrm {R} }=-{\frac {mg}{l}}\cdot x}
Setzen wir für die Beschleunigung
a
(
t
)
{\displaystyle a(t)}
a
(
t
)
=
x
¨
(
t
)
{\displaystyle a(t)={\ddot {x}}(t)}
m
{\displaystyle m}
x
¨
(
t
)
=
−
g
l
x
(
t
)
{\displaystyle {\ddot {x}}(t)=-{\frac {g}{l}}x(t)}
und es ergibt sich die
Differentialgleichung (DGL) des Fadenpendels für kleine Auslenkungen:
x
¨
(
t
)
+
g
l
⋅
x
(
t
)
=
0
{\displaystyle {\ddot {x}}(t)+{\frac {g}{l}}\cdot x(t)=0}
Vergleich mit der Differentialgleichung des harmonischen Oszillators zeigt, dass wir die selben Lösungen erhalten, wenn wir statt
ω
2
=
D
m
{\displaystyle \omega ^{2}={\frac {D}{m}}}
ω
2
=
g
l
{\displaystyle \omega ^{2}={\frac {g}{l}}}
Allgemeine Lösung der Differentialgleichung des Fadenpendels für kleine Auslenkungen:
x
(
t
)
=
x
^
⋅
sin
(
g
l
⋅
t
−
ϕ
)
{\displaystyle x(t)={\hat {x}}\cdot \sin \left({\sqrt {\frac {g}{l}}}\cdot t-\phi \right)}
Die Amplitude
x
^
{\displaystyle {\hat {x}}}
ϕ
{\displaystyle \phi }
Für die Schwingungsdauer
T
{\displaystyle T}
T
=
2
π
l
g
{\displaystyle T=2\pi {\sqrt {\frac {l}{g}}}}
Es fällt auf, dass die Schwingungsdauer
T
{\displaystyle T}
m
{\displaystyle m}
g
{\displaystyle g}
l
{\displaystyle l}
Aufgabe: Verkürzen eines Fadenpendels.
Ausgelenkte Wassersäule. → Animation Wir starten wieder mit der Bestimmung der Rückstellkraft.
Wird die Wassersäule ausgelenkt, so führt das Ungleichgewicht der Wassersäulen zu einer Rückstellkraft. Wird die Wassersäule um
s
{\displaystyle s}
2
s
{\displaystyle 2s}
F
R
=
−
g
⋅
ϱ
⋅
A
⋅
2
s
{\displaystyle F_{R}=-g\cdot \varrho \cdot A\cdot 2s}
wobei
ϱ
{\displaystyle \varrho }
A
{\displaystyle A}
[ Bearbeiten ] Setzen wir die Rückstellkraft
F
R
{\displaystyle F_{R}}
F
=
m
⋅
a
{\displaystyle F=m\cdot a}
m
⋅
a
=
−
g
⋅
ϱ
⋅
A
⋅
2
s
{\displaystyle m\cdot a=-g\cdot \varrho \cdot A\cdot 2s}
Die Masse
m
{\displaystyle m}
L
{\displaystyle L}
m
=
ϱ
⋅
L
⋅
A
{\displaystyle m=\varrho \cdot L\cdot A}
Eingesetzt in die Bewegungsgleichung und mit
a
=
s
¨
(
t
)
{\displaystyle a={\ddot {s}}(t)}
ϱ
⋅
L
⋅
A
⋅
s
¨
=
−
g
⋅
ϱ
⋅
A
⋅
2
s
⇒
{\displaystyle \varrho \cdot L\cdot A\cdot {\ddot {s}}=-g\cdot \varrho \cdot A\cdot 2s\quad \Rightarrow }
Differentialgleichung einer schwingenden Wassersäule der Länge
L
{\displaystyle L}
s
¨
(
t
)
+
2
g
L
⋅
s
(
t
)
=
0
{\displaystyle {\ddot {s}}(t)+{\frac {2g}{L}}\cdot s(t)=0}
Die Lösungen sind wieder harmonische Schwingungen, hier mit der Kreisfrequenz:
ω
2
=
2
g
L
⇒
ω
=
2
g
L
,
T
=
2
π
L
2
g
{\displaystyle \omega ^{2}={\frac {2g}{L}}\quad \Rightarrow \quad \omega ={\sqrt {\frac {2g}{L}}},\qquad T=2\pi {\sqrt {\frac {L}{2g}}}}
Aufgabe: Ein Wassersäulenpendel wird weit ausgelenkt.
Wir bestimmen die potentielle Energie
W
pot
{\displaystyle W_{\text{pot}}}
Lösungsweg 1: Es gilt mit der Spannenergie
W
Sp
{\displaystyle W_{\text{Sp}}}
W
L
{\displaystyle W_{\text{L}}}
W
pot
=
W
Sp
+
W
L
{\displaystyle W_{\text{pot}}=W_{\text{Sp}}+W_{\text{L}}}
Die Spannenergie
W
Sp
{\displaystyle W_{\text{Sp}}}
W
Sp
=
1
2
D
⋅
(
s
0
−
s
(
t
)
)
2
;
{\displaystyle W_{\text{Sp}}={\frac {1}{2}}D\cdot \left(s_{0}-s(t)\right)^{2}\,;}
die Lageenergie
W
L
{\displaystyle W_{\text{L}}}
W
L
=
m
g
⋅
(
x
+
s
(
t
)
)
,
{\displaystyle W_{\text{L}}=mg\cdot \left(x+s(t)\right)\,,}
wobei
x
{\displaystyle x}
x
{\displaystyle x}
W
pot
=
0
{\displaystyle W_{\text{pot}}=0}
W
pot
=
0
=
W
Sp
+
W
L
=
1
2
D
⋅
(
s
0
−
0
)
2
+
m
g
⋅
(
x
+
0
)
=
1
2
D
⋅
s
0
2
+
m
g
⋅
x
{\displaystyle W_{\text{pot}}=0=W_{\text{Sp}}+W_{\text{L}}={\frac {1}{2}}D\cdot \left(s_{0}-0\right)^{2}+mg\cdot \left(x+0\right)={\frac {1}{2}}D\cdot s_{0}^{2}+mg\cdot x}
⇒
x
=
−
D
2
m
g
⋅
s
0
2
{\displaystyle \Rightarrow \quad x=-{\frac {D}{2mg}}\cdot s_{0}^{2}}
Für die potentielle Energie
W
pot
{\displaystyle W_{\text{pot}}}
W
pot
=
W
Sp
+
W
L
=
1
2
D
⋅
(
s
0
−
s
(
t
)
)
2
+
m
g
⋅
(
−
D
2
m
g
⋅
s
0
2
+
s
(
t
)
)
{\displaystyle W_{\text{pot}}=W_{\text{Sp}}+W_{\text{L}}={\frac {1}{2}}D\cdot \left(s_{0}-s(t)\right)^{2}+mg\cdot \left(-{\frac {D}{2mg}}\cdot s_{0}^{2}+s(t)\right)}
W
pot
=
1
2
D
⋅
(
s
0
2
−
2
s
0
s
(
t
)
+
s
(
t
)
2
)
−
D
2
⋅
s
0
2
+
m
g
⋅
s
(
t
)
{\displaystyle W_{\text{pot}}={\frac {1}{2}}D\cdot \left(s_{0}^{2}-2s_{0}s(t)+s(t)^{2}\right)-{\frac {D}{2}}\cdot s_{0}^{2}+mg\cdot s(t)}
W
pot
=
1
2
D
⋅
(
−
2
s
0
s
(
t
)
+
s
(
t
)
2
)
+
m
g
⋅
s
(
t
)
{\displaystyle W_{\text{pot}}={\frac {1}{2}}D\cdot \left(-2s_{0}s(t)+s(t)^{2}\right)+mg\cdot s(t)}
W
pot
=
1
2
D
s
(
t
)
2
+
(
−
D
s
0
+
m
g
)
⋅
s
(
t
)
{\displaystyle W_{\text{pot}}={\frac {1}{2}}Ds(t)^{2}+(-Ds_{0}+mg)\cdot s(t)}
Da
D
s
0
=
m
g
{\displaystyle Ds_{0}=mg}
Potentielle Energie des Federpendels:
W
pot
=
1
2
D
s
2
{\displaystyle W_{\text{pot}}={\frac {1}{2}}Ds^{2}}
Lösungsweg 2: Wir integrieren die Rückstellkraft
F
R
{\displaystyle F_{R}}
s
{\displaystyle s}
W
pot
=
−
∫
0
s
F
R
(
s
)
d
s
=
∫
0
s
D
⋅
s
d
s
=
1
2
D
s
2
{\displaystyle W_{\text{pot}}=-\int _{0}^{s}F_{R}(s)\,{\rm {d}}s=\int _{0}^{s}D\cdot s\,{\rm {d}}s={\frac {1}{2}}Ds^{2}}
Einheitskreis und Satz des Pythagoras verdeutlichen:
sin
2
(
α
)
+
cos
2
(
α
)
=
1
{\displaystyle \sin ^{2}(\alpha )+\cos ^{2}(\alpha )=1}
Die kinetische Energie des Federpendels ist gegeben durch:
E
kin
=
1
2
m
v
2
=
1
2
m
s
˙
2
{\displaystyle E_{\text{kin}}={\frac {1}{2}}mv^{2}={\frac {1}{2}}m{\dot {s}}^{2}}
Aufgabe: Zeige, dass die Summe aus potentieller und kinetischer Energie zeitlich konstant ist. Verwende die Beziehung:
sin
2
(
α
)
+
cos
2
(
α
)
=
1
{\displaystyle \sin ^{2}(\alpha )+\cos ^{2}(\alpha )=1}
Der Oszillator wandelt periodisch potentielle Energie
W
pot
=
1
2
D
s
2
{\displaystyle W_{\text{pot}}={\frac {1}{2}}Ds^{2}}
E
kin
=
1
2
m
v
2
{\displaystyle E_{\text{kin}}={\frac {1}{2}}mv^{2}}
Phasendifferenz zwischen zwei Oszillatoren [ Bearbeiten ] Rechts: Zwei Schwingungen, die sich im Phasenwinkel um Δφ unterscheiden. Die blaue Schwingung eilt der roten um 60° voraus. Links: Zwei rotierende Zeiger mit demselben Unterschied im Phasenwinkel.Zueinander phasenverschoben schwingende Oszillatoren. Gegeben sind zwei Oszillatoren gleicher Frequenz. Die Schwingungen werden beschrieben durch:
s
1
(
t
)
=
s
1
^
sin
(
ω
t
)
{\displaystyle s_{1}(t)={\hat {s_{1}}}\sin(\omega t)}
Oszillator 2:
s
2
(
t
)
=
s
2
^
sin
(
ω
t
−
φ
)
{\displaystyle s_{2}(t)={\hat {s_{2}}}\sin(\omega t-\varphi )}
Man bezeichnet
φ
{\displaystyle \varphi }
Spezialfälle:
φ
=
0
{\displaystyle \varphi =0}
φ
=
π
{\displaystyle \varphi =\pi }
φ
=
π
2
{\displaystyle \varphi ={\frac {\pi }{2}}}
π
2
{\displaystyle {\frac {\pi }{2}}}
π
2
{\displaystyle {\frac {\pi }{2}}}
Amplitudengang des harmonischen Oszillators für verschieden starke Dämpfung D aufgetragen gegen das Frequenzverhältnis
ω
/
ω
0
{\displaystyle \omega /\omega _{0}}

 Fadenpendel
Fadenpendel Federpendel
Federpendel Federpendel animiert
Federpendel animiert Schwingende Wassersäule
Schwingende Wassersäule Animation einer harmonischen Schwingung
Animation einer harmonischen Schwingung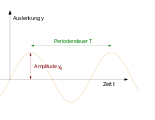 --Diagramm einer Schwingung
--Diagramm einer Schwingung Federpendel: Ruhelage,Koordinatensystem und Rückstellkraft
Federpendel: Ruhelage,Koordinatensystem und Rückstellkraft











![{\displaystyle f={\frac {1}{T}},\quad [f]={\frac {1}{\rm {s}}}={\rm {Hz}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fe8f91a4835376b5213b48b623355a4cf61ab8c7)
![{\displaystyle \omega =2\pi f,\quad [\omega ]={\frac {1}{\rm {s}}}={\rm {Hz}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec104febb915a160c3da6a813fbb5edf204722db)






































































































{kind=link}
{kind=link}